GPS定位信号相位法测距
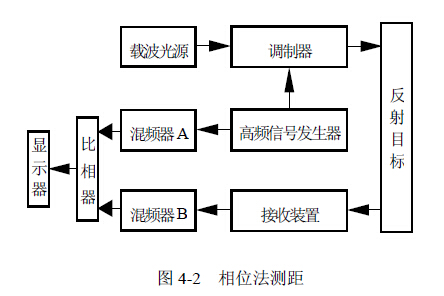
相位法测距的基本原理如图 4-2 所示。由载波光源发出的光信号通过调制器(Modulator)进行调制,输出成为光强随高频信号变化的调制光波(Modulated Light),射向被测目标。与此同时,高频信号发生器也向混频器A 发出相同频率的参考信号,调制光波经由被测目标反射后回到接收装置,继而又进入混频器B,成为测距信号。由此,只要比较参考信号与测距信号之间的相位移(Displacement Phase),就能得出被测距离。
如果把调制光在被测距离上往返路程拉直,则有图4-3 所示波形。

由图4-3 可知,调制光在被测距离上往返的相位差为:
假设调制信号波长为λ,则被测距离为:
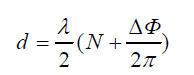
式中N 为相位差整周数(整周波数),ΔФ/2π 为不足一周的波数。
在相位式测距仪中,ΔФ 一般可以直接测定,而N 却不能直接测量。这样一来,距离值将无法唯一确定。
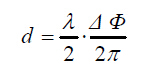
从(4-5)式可以看出,如果调制信号的波长的1/2(也称测尺长度),超过待定距离d,即λ/2>d,则有整周波数N=0。于是,被测距离为:
为了唯一确定距离值,就必须选择较长的测尺。但由于仪器的测相精度有限(设为10-3)
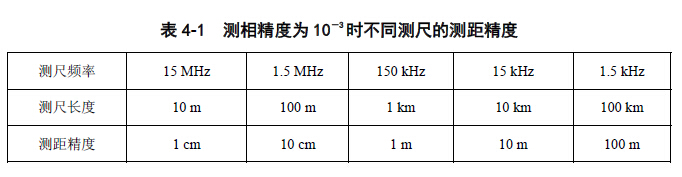
如表4-1 所示,测距误差随着测尺长度的增加而扩大,测程越长测距精度越低。
鉴于测程与精度存在矛盾,可以选用一组测尺(两个或两个以上不同波长的调制光)共同测距,以长测尺来确定大数,以短测尺来保证精度。例如测量一段长度为767.68m,选用两把测尺分别为λ1/2=1 000m 和λ2/2=10m。用λ1 可以测得不足1 000m 的尾数为767m,用λ2 可以测得不足10m 的尾数为7.68m,将两者组合起来即为767.68m。这样做既保障测程足够长,又能保障相当的测距精度。相位式测距仪一般采用红外光作为载波,精度可达0.5~10mm。测距的方式除了脉冲法和相位法还有很多,这里不再一一介绍。
(内容编辑:锐峰汇智GPS定位器 https://www.rfgsm.com/)
尊敬的访客:如果您想了解或购买GPS定位 防盗产品,请点击下方按钮联系我们


您也可以直接拨打客服热线:4007-888-200
推荐阅读:
GPS应用于大型设备的超精密安装
GPS定位技术在精密工程测量中的应用
GPS定位技术在普通工程测量中的应用
GPS技术在工程测量中的应用
GPS定位在大地(控制)测量方面的应用



